This is a motorized rotating table designed for displaying models, small products, or for photography setups. The table rotates automatically at one of four selectable speeds, controlled by an Arduino and a button. It’s compact, quiet, and fully 3D-printable.
When the power switch is turned on, the table starts rotating at the first speed.
Pressing the button cycles through 4 pre-set speeds.
After the 4th speed, the next button press resets it back to the first.
The rotating top is mounted directly on the motor shaft and rests on three 6803 bearings, ensuring stable and low-friction rotation.
🧰 Assembly Instructions
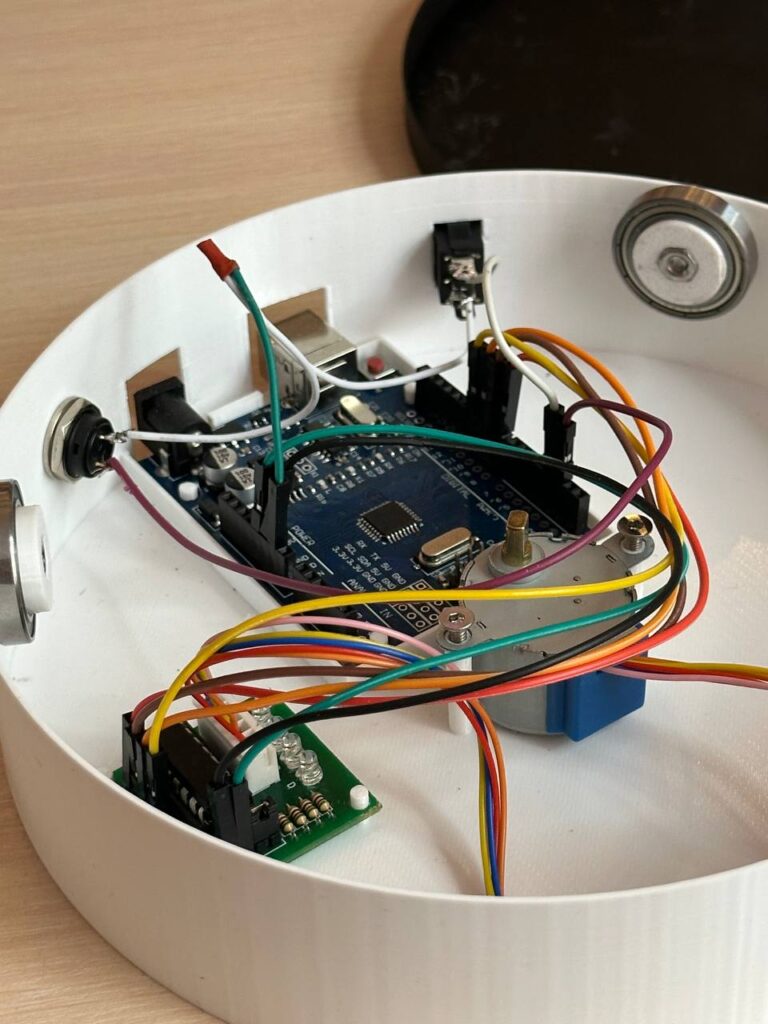
Insert the Arduino Uno and ULN2003 driver Place both boards into their dedicated slots inside the printed base. Make sure they sit securely.
Mount the stepper motor Insert the 28BYJ-48 motor onto the positioning pins in the center of the base, so that the shaft is aligned perfectly in the middle.
Install M4 nuts into the bearing holders Press the M4 nuts into the hexagonal cutouts of the bearing brackets. Then attach the brackets to the side walls using the M4x12mm bolts.
Place the bearings Slide the three 6803 bearings onto their holders. These will support the rotating platform smoothly.
Mount the button and power switch Insert the momentary button and the KCD11 toggle switch into their designated panel slots.
Assemble and solder the electronics Connect the motor, driver, Arduino, button, and switch using jumper wires. Solder the power lines securely and connect to a 5V 2A external power adapter.
🔌 Wiring Diagram (Text Version)
🧠 ULN2003 Driver → Arduino Uno
ULN2003 Pin
Arduino Pin
IN1
D8
IN2
D9
IN3
D10
IN4
D11
VCC
5V
GND
GND
🔸 The stepper motor connects directly to the ULN2003 via the 5-pin header.